



For individuals recovering from a stroke or spinal cord injury, restoring hand and arm function is essential to regaining independence. Robot-assisted therapy is an emerging rehabilitation tool that offers consistent and precise movement training. However, its real-world applicability remains limited due to variability in hand use during daily activities outside clinical settings. Researchers from UHN’s KITE Research Institute are addressing this challenge by integrating real-world objects into robot-assisted therapy.
The research team, led by Dr. Milos Popovic, Senior Scientist and Director of the KITE Research Institute, adapted a common clinical assessment tool—the Toronto Rehabilitation Institute-Hand Function Test (TRI-HFT)—for use in robot-assisted therapy. Traditionally, the TRI-HFT involves manipulating everyday objects that require different grips, including a mug, a sheet of paper, a book, a credit card, and a pencil. By redesigning these objects for robotic compatibility, the team enabled the robotic arm to interact with them, allowing the test to be used during therapy.
The team redesigned and 3D-printed 11 TRI-HFT objects. Testing demonstrated that the robotic arm successfully picked up and moved each object, achieving a 100% success rate. Additionally, five participants with normal arm and hand function evaluated the system’s safety and usability, reporting that it was comfortable, engaging, and easy to use.
By combining advanced robotics with traditional rehabilitation tools, this approach enhances the functionality, personalization, and real-world application of robot-assisted therapy. The research explores a new approach to robotic rehabilitation, and the findings lay the groundwork for more effective recovery strategies and improved long-term outcomes. Future research will explore broader clinical applications and adaptability across different robotic systems.
Aisha Raji, a PhD student in Dr. Milos Popovic’s and Dr. Cesar Marquez-Chin's lab, is the first author of the study.
Dr. César Márquez Chin, Scientist at the KITE Research Institute, is a co-author of the study. He is also a Faculty Affiliate at the Institute of Biomedical Engineering at the University of Toronto.
Dr. Milos Popovic, Senior Scientist and Director of the KITE Research Institute, is the senior author of the study. He is also a Professor and Director of the Institute of Biomedical Engineering at the University of Toronto.
This work was supported by UHN Foundation.
Dr. Milos Popovic was a guest editor for the Journal of ‘BioMedical-Engineering OnLine’ for a special issue on the International Conference on Aging, Innovation and Rehabilitation (ICAIR) 2024. To maintain editorial integrity, all standard procedures were strictly followed. The manuscript was handled by independent editors, and Dr. Popovic had no role in the editorial decisions or peer-review.
Raji A, DiNunzio S, Whitmell A, Marquez-Chin C, Popovic MR. Modification of the toronto rehabilitation institute-hand function test for integration into robot-assisted therapy: technical validation and usability. Biomed Eng OnLine. 2025 May 7. doi: 10.1186/s12938-025-01384-7.
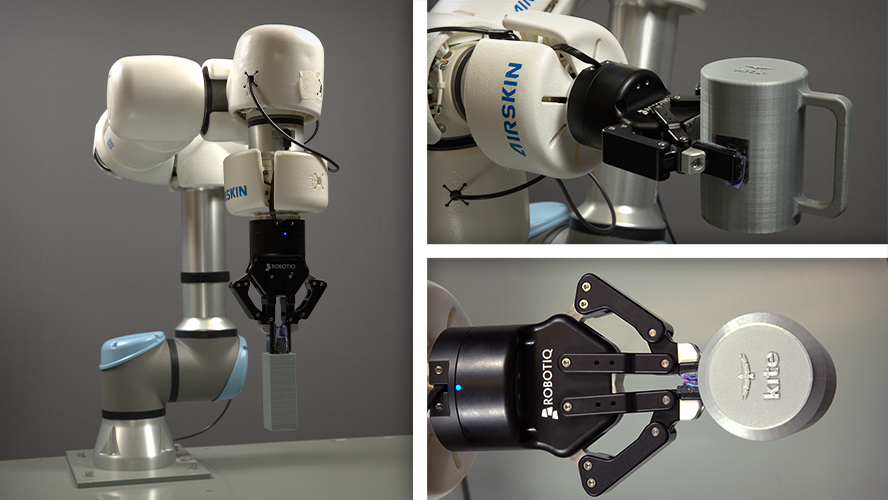
Modified, 3D-printed TRI-HFT objects and the robotic arm gripping them. (Images by KITE Studio)